Разновидности простейших движков-трансформаторов
Движки переменного тока могут быть синхронными. Схема получается проще, а мотор дешевле. Хотя все асинхронные двигатели содержат статор, аналогичный синхронной машине, конструкция ротора определяет их существенное отличие от них. Его не нужно намагничивать тем или иным способом, как это делается в синхронном движке. Несмотря на отличия моделей асинхронных машин, конструкция их ротора — это эквивалент короткозамкнутой вторичной обмотки.
Самый простой вариант — короткозамкнутый ротор. Его можно просто отлить из ферромагнитного материала и обработать надлежащим образом. Сплавы на основе железа проводят электрический ток и взаимодействуют с магнитным полем. Цельнометаллическая конструкция обладает следующими преимуществами:
- наиболее проста в изготовлении и по этой причине обладает минимальной себестоимостью;
- лучше всего переносит усилия, возникающие при работе двигателя;
- хорошо разгоняется из-за эффективного взаимодействия магнитных полей.
Цельнометаллический вариант
Как преодолеваются недостатки болванки
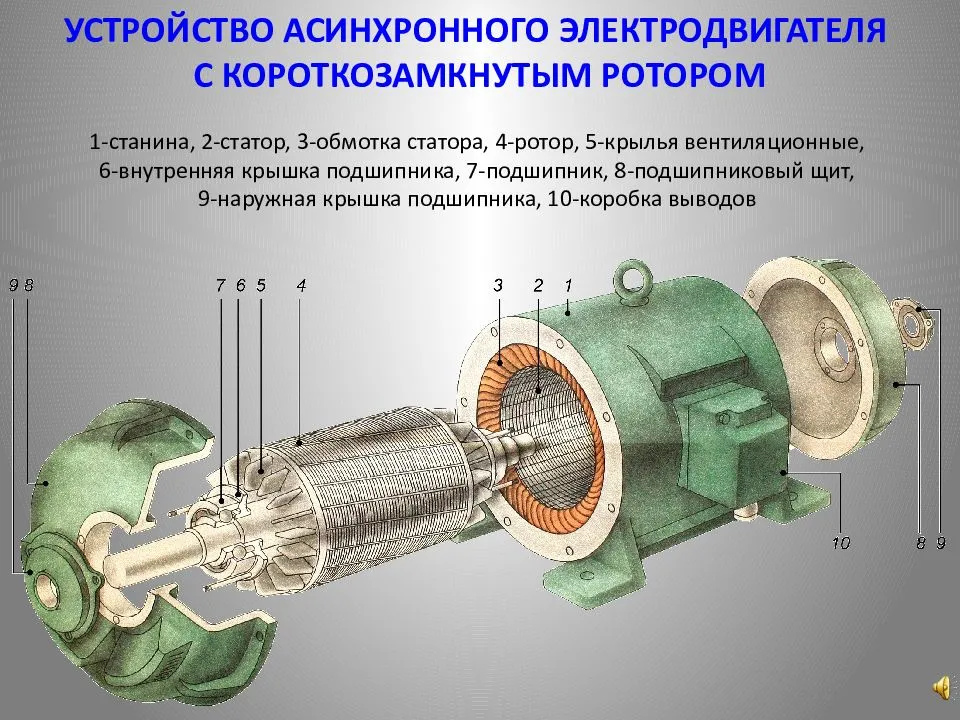
Однако вполне очевидно то, что такой короткозамкнутый ротор будет не лучшим проводником для токов, индуцируемых статором. Сплавы железа проводят электроток заметно хуже алюминия или меди. Кроме этого ведь неспроста магнитопроводы трансформаторов изготавливают из стальных пластин, а не из цилиндрических болванок. Вихревые токи нагревают литой металл и уменьшают общую эффективность электроустановки. Поэтому недостатки массивности конструкции из железного сплава конструктивно учитывает наиболее эффективный двигатель с короткозамкнутым ротором.
В таком электродвигателе используются алюминиевые или медные детали. Функции применительно к созданию магнитного поля и проводимости тока конструктивно разделяются. Для получения переменного магнитного поля с малыми потерями по аналогии с трансформаторами применяются тонкие изолированные пластины. Каждая из них содержит выемки и по форме эквивалентна поперечному сечению ротора. Ее материалом является трансформаторная сталь.
Как получается беличье колесо (клетка)
После того как пластины собраны, получается цилиндр с канавками. Они образованы выемками, в которые укладываются стержни из алюминия или меди. На торцы цилиндра надеваются пластины или кольца из такого же металла, что и стержни, концы которых крепятся к ним. Каждая пара диаметрально противоположных стержней, таким образом, создает короткозамкнутый виток. Его сопротивление индуцируемому току гораздо меньше, чем у железного сплава. Стержни с пластинами выглядят, как беличья клетка.
Беличья клетка
Поэтому двигатель с короткозамкнутым ротором такой конструкции имеет меньше потерь и по этой причине широко распространен. Но сходство этого электромотора асинхронного электродвигателя короткозамкнутым ротором своим похожего на обычный нагруженный силовой трансформатор ограничено к применению в некоторых электросетях. Не каждая из них может выдержать большой пусковой ток. Если асинхронные электродвигатели с короткозамкнутым ротором будут стартовать одновременно, величина тока будет велика и сравнима с коротким замыканием.
В начале их пуска происходит процесс, аналогичный включению трансформатора с вторичной обмоткой, замкнутой накоротко. В этом начальном положении магнитное поле почти неподвижно, и в этой связи так называемое скольжение получается самым большим. Неподвижный короткозамкнутый ротор асинхронного двигателя создает при пуске наиболее мощное электромагнитное поле. Ведь он собран из листовой стали, отличающейся минимальными вихревыми потерями, а беличье колесо характеризуется минимальным электрическим сопротивлением.
Получение вращающегося магнитного поля
Рассматривая работу трехфазных трансформаторов, можно убедиться, что сумма мгновенных значений пульсирующих (переменных) магнитных потоков трех стержней всегда равна нулю. Происходит это потому, что оси трех обмоток AX, BY, CZ параллельны друг другу, как показано на рис. 1. Направление мгновенных токов нанесено для момента времени a диаграммы трехфазного тока (рис. 2). Такой же эффект получается, если обмотки расположены на одной, общей оси (рис. 3).

Рис. 1. Суммирование мгновенных значений магнитных потоков трехфазного генератора
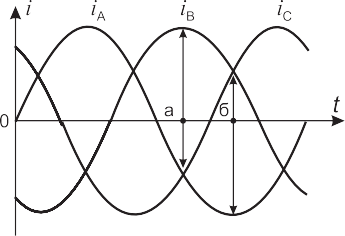
Рис. 2. Кривые трехфазного тока
Рис. 3. Суммирование магнитных потоков трех обмоток, расположенных на одной оси
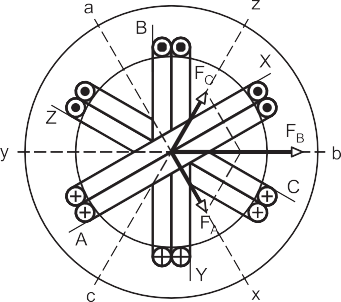
Рис. 4. Суммарный магнитный поток трехфазной обмотки асинхронного двигателя
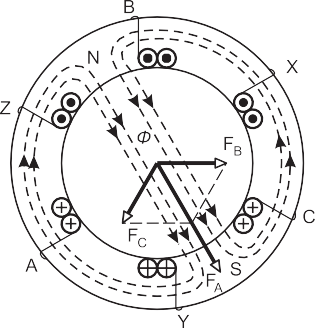
Рис. 5. Суммарный магнитный поток двигателя для момента времени б (рис. 2)
Однако дело существенно меняется, если обмотки расположены в пространстве под углом 120°, так же как и оси. Такое размещение обмоток на внутренней поверхности стального цилиндра показано на рис. 4. Токи в проводах обмотки нанесены для момента времени a диаграммы на рис. 2 и соответствуют показанным на рис. 3.
Намагничивающая сила обмотки BY – FBm направлена по оси обмотки by и имеет максимальное значение, так как iB= IBm. Намагничивающая сила обмотки AX – FAнаправлена по оси своей обмотки ax, но равна 0,5 FBm, так как ток iA= 0,5IBm. Точно так же FC= 0,5FBmи направлена по оси cx. Легко видеть, что при данном расположении намагничивающие силы создают суммарную н.с.:
F = FA+ FC+ FBm= 1,5FBm.
Если рассмотреть явление через 1/6 периода (точка б на рис. 2), то можно видеть (рис. 5), что результирующая н.с., сохранив свое значение, повернулась на 1/6 окружности, т.е. на 60°.
Вместе с н.с. трехфазной обмотки вращается и созданный ею суммарный магнитный поток Ф. При данной конструкции обмоток поток оказался двухполюсным (2р = 1), т.е. имеет одну пару полюсов, что и показано на рис. 5.
Легко видеть, что за один период тока магнитный поток сделает один оборот, а за f периодов в секунду или за f·60 периодов в минуту двухполюсный поток сделает:
Если сконструировать обмотки так, чтобы число пар полюсов было больше единицы (2р = 2, 3, 4…), то скорость вращения магнитного потока уменьшается во столько раз, во сколько 2р >
Итак, трехфазный ток, обтекая трехфазную обмотку, создает вращающийся с постоянной скоростью магнитный поток, сохраняющий свою амплитуду, в 1,5 раза большую амплитуды потока одной фазы
Ф = 1,5Ффзы.
Рис. 6. Статор асинхронного электродвигателя без обмотки
Рис. 7. Стальной лист статора
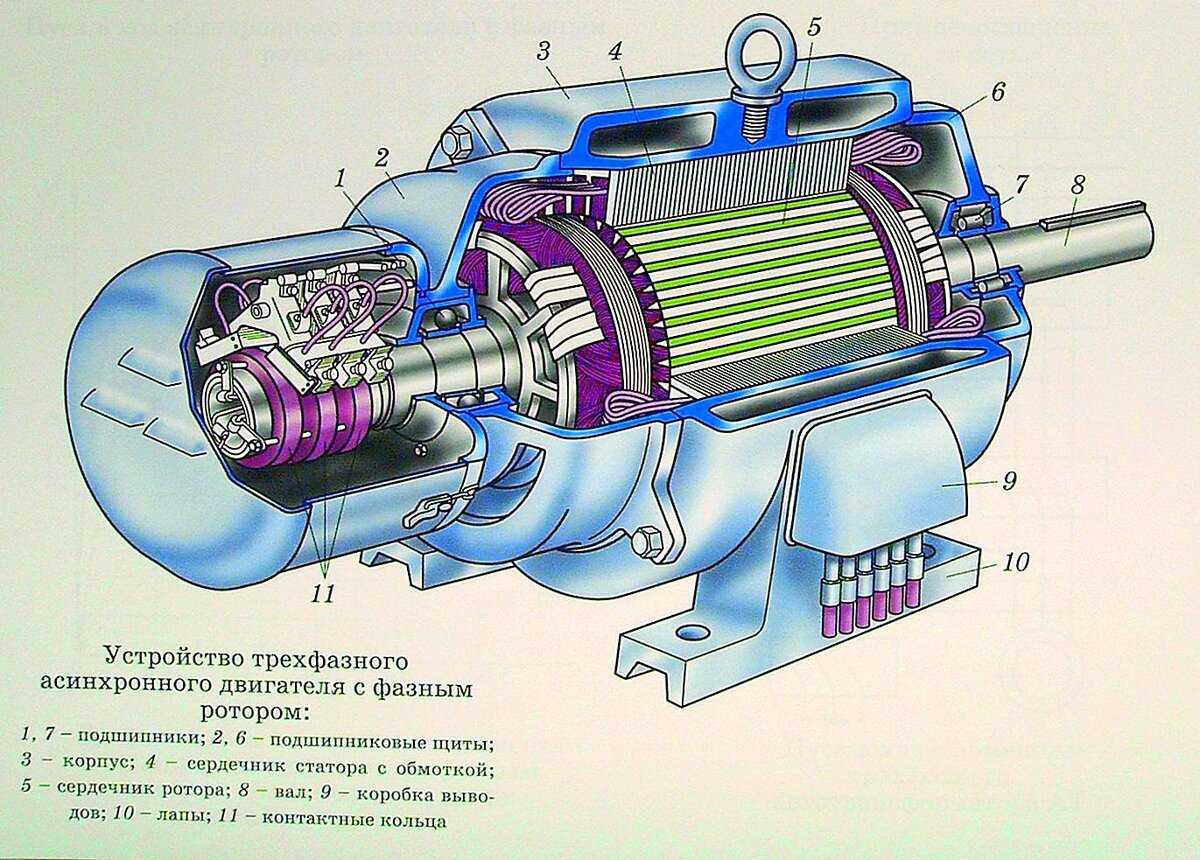
В асинхронных электродвигателях трехфазная обмотка располагается в пазах внутренней цилиндрической поверхности неподвижной части машины — статора (рис. 6). Статор состоит внешнего стального корпуса 1, в который запрессован стальной сердечник статора 2, имеющий пазы. Сердечник собирается из стальных штампованных листов (рис. 7) электротехнической стали, изолированных друг от друга с обеих сторон специальным лаком. Корпус статора у показанного электродвигателя с внешней стороны обдувается воздухом при помощи вентилятора, и для увеличения охлаждаемой поверхности она выполнена ребристой.



Так как внутри статора должна помещаться вращающаяся часть — ротор, то лобовые части обмотки, не лежащие в пазах, должны укладываться не так, как показано на рис. 4, а на торцевых сторонах сердечника статора 2 (рис. 8). Начала
фаз А, В, С смещены на 120 эл. градусов (рис. 8), а выводы от них помещены в распределительную коробку 3 (рис. 6).

Рис. 8. Расположение обмоток статора в пазах
Дополнительный вопрос
Почему контактное кольцо используется в асинхронном двигателе?
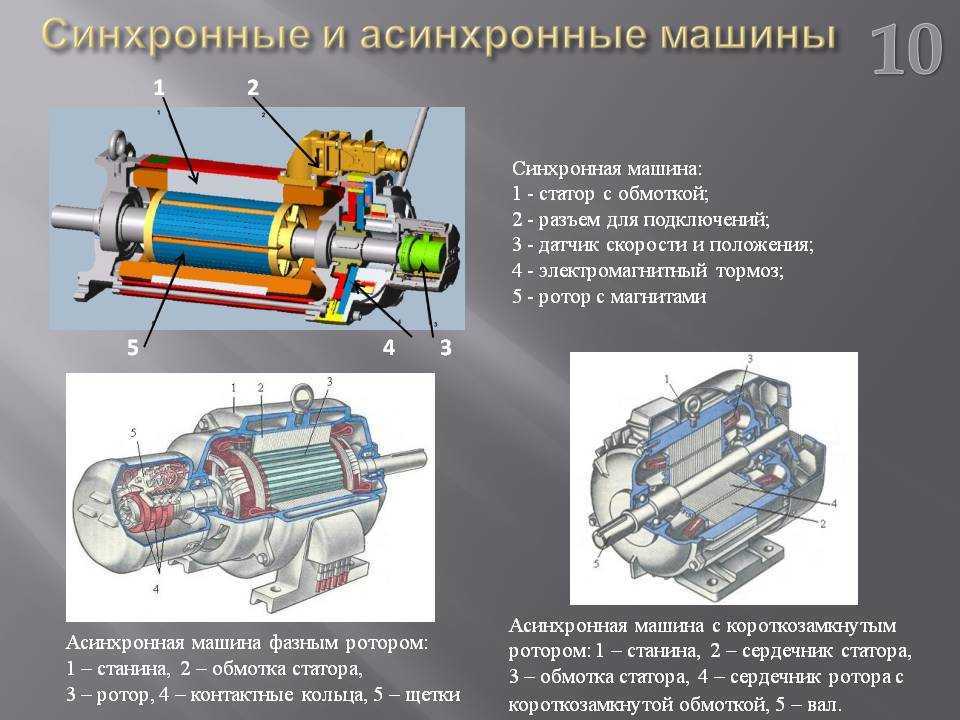
В версии асинхронного двигателя переменного тока, называемой двигателем с фазным ротором, токосъемные кольца используются не для передачи мощности, а для введения сопротивления в обмотки ротора. Поскольку токосъемные кольца вращаются вместе с ротором, щетки поддерживают постоянный контакт с кольцами и передают сопротивление обмоткам ротора.
Каково назначение ротора?
Роторы — это движущаяся часть генератора переменного тока с постоянными магнитами, которые перемещаются вокруг железных пластин статора для выработки переменного тока (AC). Для работы роторов требуется существующее движение, поэтому только после того, как двигатель или турбина уже запущены, ротор будет работать со статором для обеспечения заряда.
Для чего используется двигатель с короткозамкнутым ротором?
Асинхронные двигатели с короткозамкнутым ротором широко используются во многих промышленных приложениях. Они особенно подходят для приложений, где двигатель должен поддерживать постоянную скорость, быть самозапускающимся или требуется минимальное техническое обслуживание. Эти двигатели обычно используются в: Центробежных насосах.
Как работает двигатель с короткозамкнутым ротором?
Электродвигатели с короткозамкнутым ротором — это подкласс асинхронных двигателей, которые используют электромагнетизм для создания движения. Переменный ток, проходящий через статор, создает ЭДС, которая колеблется в зависимости от частоты переменного тока, которая «вращается» вокруг ротора, индуцируя противоположные магнитные поля в стержнях ротора, тем самым вызывая движение.
В чем разница между статором и ротором?
Термин «статор» происходит от слова «стационарный». Таким образом, статор является неподвижной частью двигателя переменного тока. Ротор представляет собой вращающийся электрический компонент. Он также состоит из группы электромагнитов, расположенных вокруг цилиндра, полюса которых обращены к полюсам статора.
Почему используется конструкция фазного ротора?
В: Почему используется конструкция фазного ротора? Ротор с обмоткой имеет возможность увеличения сопротивления ротора за счет токосъемных колец. При пуске необходимо высокое значение сопротивления ротора, чтобы получить высокое значение пускового момента.
Что такое индукционный генератор с короткозамкнутым ротором?
Асинхронный генератор с короткозамкнутым ротором (SCIG) прикреплен к ветряной турбине с помощью редуктора. Обмотки статора SCIG соединены встречно-параллельно с преобразователем полной мощности. Ветряная турбина отвечает за преобразование энергии ветра в кинетическую энергию.
Какова функция ротора?
Роторы — это движущаяся часть генератора переменного тока с постоянными магнитами, которые перемещаются вокруг железных пластин статора для выработки переменного тока (AC). Для работы роторов требуется существующее движение, поэтому только после того, как двигатель или турбина уже запущены, ротор будет работать со статором для обеспечения заряда.
Какова функция статора и ротора в машине постоянного тока?
В электродвигателе статор создает вращающееся магнитное поле, которое приводит в движение вращающийся якорь; в генераторе статор преобразует вращающееся магнитное поле в электрический ток. В устройствах с гидравлическим приводом статор направляет поток жидкости к вращающейся части системы или от нее.
Что такое асинхронный двигатель с короткозамкнутым ротором?
Асинхронный двигатель с двойным короткозамкнутым ротором состоит из ротора, который имеет две независимые клетки, расположенные одна над другой в одном и том же пазу. На рисунке показан ротор с двойной короткозамкнутой клеткой. Верхние щелевые проводники внешней клетки и нижние щелевые проводники образуют внутреннюю клетку.
В каком устройстве используются токосъемные кольца?
Эти кольца, также называемые вращающимися электрическими интерфейсами, вращающимися электрическими соединителями, коллекторами, вертлюгами или электрическими вращающимися соединениями, обычно используются в двигателях с контактными кольцами, электрических генераторах для систем переменного тока (AC) и генераторах переменного тока, а также в упаковочном оборудовании, кабельных барабанах и ветровых установках. турбины.
Почему используются роторные раны?
Двигатель с фазным ротором представляет собой вариант трехфазного асинхронного двигателя, предназначенный для обеспечения высокого пускового момента для нагрузок с высокой инерцией при очень низком токе.
Основные характеристики, недостатки и преимущества асинхронного двигателя с короткозамкнутым ротором. Подключение двигателя
К основным характеристикам асинхронного двигателя с короткозамкнутым ротором относятся: мощность, величина тока при максимальном напряжении, коэффициент полезного действия, частота вращения вала.
К преимуществам асинхронного двигателя с короткозамкнутым ротором относятся:
- Относительно низкая стоимость, по сравнению с моделями на основе фазных роторов.
- Стабильность при функционировании в условиях нормальной нагрузки.
- Высокий коэффициент полезного действия.
- Высокая степень надежности.
- Низкие эксплуатационные затраты.
- Долговечность.
Недостатками асинхронных двигателей с короткозамкнутым ротором являются низкий коэффициент скольжения, высокие пусковые токи, чувствительность к перепадам напряжения, необходимость в коммутационных устройствах управления и т.п.
Статорные обмотки трехфазных асинхронных двигателей могут быть подключены по схеме либо треугольника, либо звезды. Электрический двигатель, который подключается к одной и той же сети разными способами, потребляет разную мощность. Именно поэтому нельзя подключить двигатель, рассчитанный на схему звезда, треугольником, так как в этом случае значительно снизится пусковой момент.
Определение 2
Пусковой момент – это механический вращающий момент, который развивает электрический двигатель на валу во время пуска.
Для того, чтобы уменьшить пусковые токи можно коммутировать контакты звезды в треугольник, однако, это также поспособствует снижению пускового момента. Для того, чтобы подключить трехфазный электрический двигатель с короткозамкнутым ротором к однофазному току используются такие фазосдвигающие элементы, как резисторы и конденсаторы. При этом можно использовать как схему подключения звездой, так и треугольником. Для того, чтобы управлять работой двигателя, в электрическую сеть статора подключаются дополнительные устройства.
Область применения
 В виду особенности конструкции и простоты изготовления, подобные электромоторы нашли основное применение в машинах и механизмах в которых не требуется большое усилие и мощность при работе.
В виду особенности конструкции и простоты изготовления, подобные электромоторы нашли основное применение в машинах и механизмах в которых не требуется большое усилие и мощность при работе.
В основном, такие моторы устанавливаются практически на всех бытовых приборах:
- мясорубки;
- фены;
- электрические миксеры;
- бытовые вентиляторы;
- небольшие маломощные бытовые станки;
Трехфазные асинхронные моторы имеют различную мощность, от 150 Вт до нескольких киловатт, и применяются в основном в промышленности в качестве моторов для машин и механизмов.
Применение подобного типа моторов обусловлено приемлемым с точки зрения соотношения мощность/производительность, к тому же, как и их простейшие собраться такие двигатели не требуют большого внимания и кропотливого обслуживания, в особенности те типы корпуса, которые специально разработаны для работы в тяжелых условиях производства.
Управление асинхронным двигателем
- Способы подключения асинхронного электродвигателя к сети питания:
- прямое подключение к сети питания
- подключение от устройства плавного пуска
- подключение от преобразователя частоты
Прямое подключение к сети питания
Использование магнитных пускателей позволяет управлять асинхронными электродвигателями путем непосредственного подключения двигателя к сети переменного тока.
С помощью магнитных пускателей можно реализовать схему:
- нереверсивного пуска: пуск и остановка;
- реверсивного пуска: пуск, остановка и реверс.
Использование теплового реле позволяет осуществить защиту электродвигателя от величин тока намного превышающих номинальное значение.
Реверсивная схема
Недостатком прямой коммутации обмоток асинхронного электродвигателя с сетью является наличие больших пусковых токов, во время запуска электродвигателя.
Плавный пуск асинхронного электродвигателя
В задачах, где не требуется регулировка скорости электродвигателя во время работы для уменьшения пусковых токов используется устройство плавного пуска.
Устройство плавного пуска защищает асинхронный электродвигатель от повреждений вызванных резким увеличением потребляемой энергии во время пуска путем ограничения пусковых токов. Устройство плавного пуска позволяет обеспечить плавный разгон и торможение асинхронного электродвигателя.







Устройство плавного пуска дешевле и компактнее частотного преобразователе. Применяется там, где регулировка скорости вращения и момента требуется только при запуске.
Частотное управление асинхронным электродвигателем
Для регулирования скорости вращения и момента асинхронного двигателя используют частотный преобразователь. Принцип действия частотного преобразователя основан на изменении частоты и напряжения переменного тока.
- Использование частотного преобразователя позволяет:
- уменьшить энергопротребление электродвигателя;
- управлять скоростью вращения электродвигателя (плавный запуск и остановка, регулировка скорости во время работы);
- избежать перегрузок электродвигателя и тем самым увеличить его срок службы.
- В зависимости от функционала частотные преобразователи реализуют следующие методы регулирования асинхронным электродвигателем:
- скалярное управление;
- векторное управление.
Скалярное управление является простым и дешевым в реализации, но имеет следующие недостатки — медленный отклик на изменение нагрузки и небольшой диапазон регулирования. Поэтому скалярное управление обычно используется в задачах, где нагрузка либо постоянна, либо изменяется по известному закону (например, управление вентиляторами).
Векторное управление используется в задачах, где требуется независимо управлять скоростью и моментом электродвигателя (например, лифт), что, в частности, позволяет поддерживать постоянную скорость вращения при изменяющемся моменте нагрузки. При этом векторное управление является самым эффективным управлением с точки зрения КПД и увеличения времени работы электродвигателя.
Среди векторных методов управления асинхронными электродвигателями наиболее широкое применение получили: полеориентированное управление и прямое управление моментом.
Полеориентированное управление позволяет плавно и точно управлять параметрами движения (скоростью и моментом), но при этом для его реализации требуется информация о направлениии вектора потокосцепления ротора двигателя.
- По способу получения информации о положении потокосцепления ротора электродвигателя выделяют:
- полеориентированное управление по датчику;
- полеориентированное управление без датчика: положение потокосцепления ротора вычисляется математически на основе той информации, которая имеется в частотном преобразователе (напряжение питания, напряжения и токи статора, сопротивление и индуктивность обмоток статора и ротора, количество пар полюсов двигателя).
Прямое управление моментом имеет простую схему и высокую динамику работы, но при этом высокие пульсации момента и тока.
Принцип работы асинхронного двигателя
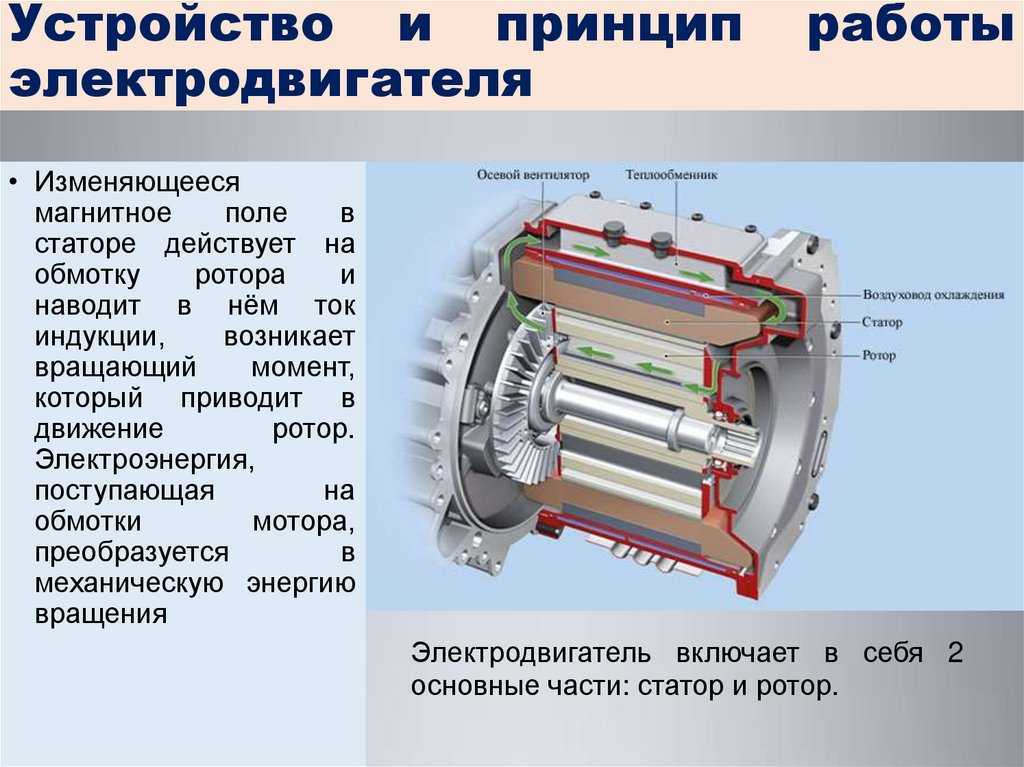
Принцип работы и скольжения в асинхронных машинах переменного тока предельно прост. В электрической обмотке статора, при подаче на нее напряжения, создается магнитное поле. При подаче напряжения переменного тока происходит изменения магнитного потока, создаваемого статором. Таким образом, магнитное поле статора изменяется и магнитные потоки поступают на ротор, что приводит его в действие и заставляет вращаться. Однако для обеспечения асинхронной работы статора и ротора необходимо чтобы магнитный поток и напряжение статора было равно по величине переменному току. Это обеспечит возможность ее работы исключительно от источника переменного тока.
Если асинхронный двигатель выполняет функцию генератора, то он будет вырабатывать постоянный ток. В этом случае вращение ротора будет обеспечиваться благодаря воздействию внешних источников, например, турбиной. Если в устройстве ротора присутствует так называемый остаточный магнетизм, то он будет обладать определенными магнитными свойствами, которые присущи магниту. В этом случае в стационарной обмотке статора будет вырабатываться переменный поток. Таким образом, наведенное напряжение будет поступать в обмотки катушек статора по принципу магнитной индукции.
Область применения индукционных генераторов достаточно широка. Их используют для обеспечения резервным источником электрического питания небольших магазинчиков и частных домов. Это одни из самых дешевых и простых в установке и эксплуатации типов радиаторов. В последние годы все активнее индукционные генераторы применяются во многих странах по всему миру, в которых существует проблема, связанная с постоянными перепадами напряжения в электрической сети. В процессе работы генератора, ротор приводится в движение благодаря дизельному двигателю небольшой мощности, подключенному к асинхронному генератору.
Виды электромеханических устройств
Используют ротор в таких электромеханических устройствах, как двигатели, работающие на постоянном и переменном электрическом токе, генераторы.
Агрегаты, работающие на переменном токе
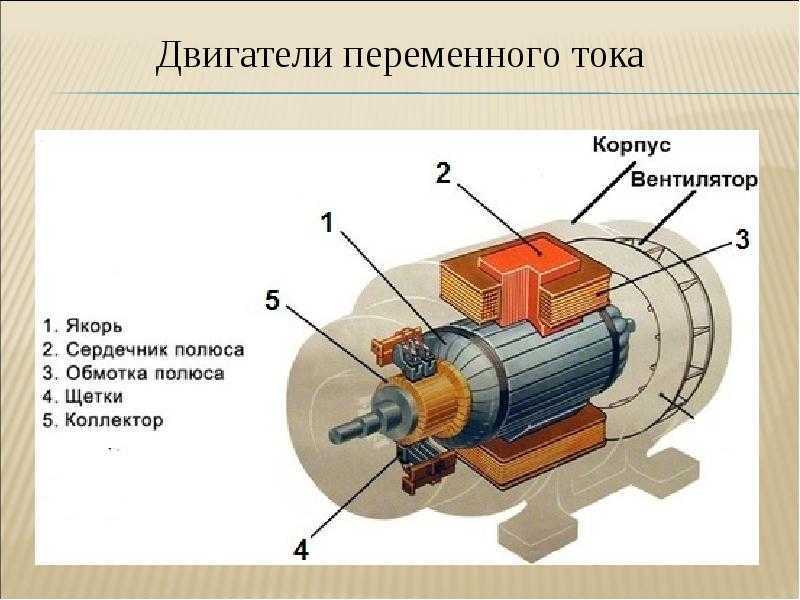
К таким агрегатам относятся различные электродвигатели. Наиболее распространенная модель данного устройства состоит из следующих частей:
- Алюминиевый или чугунный ребристый корпус с монтажной коробкой для подключения обмоток статора и ротора;
- Статор – неподвижная часть в виде полого цилиндра, расположенная внутри корпуса. Обмотка статора состоит из 3 пар расположенных друг напротив друга намотанных в пазы корпуса катушек из медного изолированного провода
- Цельнометаллический цилиндрический ротор с валом и пазами, в которые впаяны обладающие высокой токопроводящей способностью алюминиевые стержни.
 Двигатель, запитываемый от переменного тока
Двигатель, запитываемый от переменного тока
Вращается ротор на двух опорных подшипниках, запрессованных на его валу. Охлаждение работающего на больших оборотах электродвигателя происходит, благодаря крыльчатке – небольшому вентилятору, состоящему из множества лопастей и расположенному на одном из концов вала ротора. Также эффективному охлаждению работающего агрегата способствует ребристая структура алюминиевого корпуса.
Принцип работы подобного двигателя заключается в следующем:
- При подключении тока к агрегату он попеременно проходит через одну из трех пар катушек статора.
- При протекании по парам статорных катушек электрического тока они создают магнитное поле, силовые линии которого пересекают ротор.
- Попеременно запитываемые пары катушек создают подвижное магнитное поле, которое по закону электромагнитной индукции провоцирует появление в неподвижных металлических стержнях ротора электрического тока.
- Индуцированный ток в роторе приводит к появлению силы, выталкивающей его из магнитного поля статора. Так как частота подачи тока на катушки статора в среднем составляет порядка 30 импульсов в секунду, появившаяся в роторе выталкивающая сила приводит к его вращению с большой скоростью.
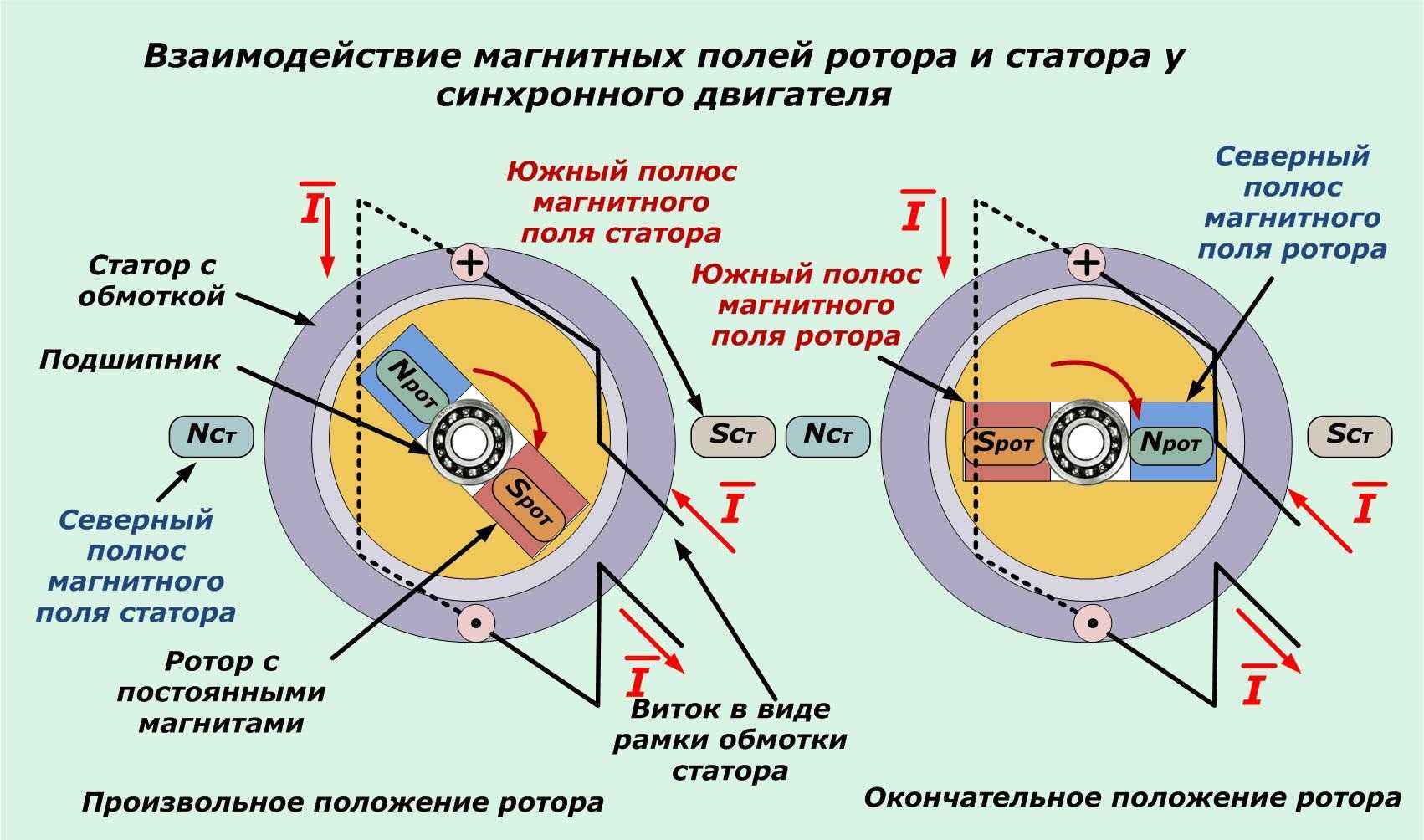
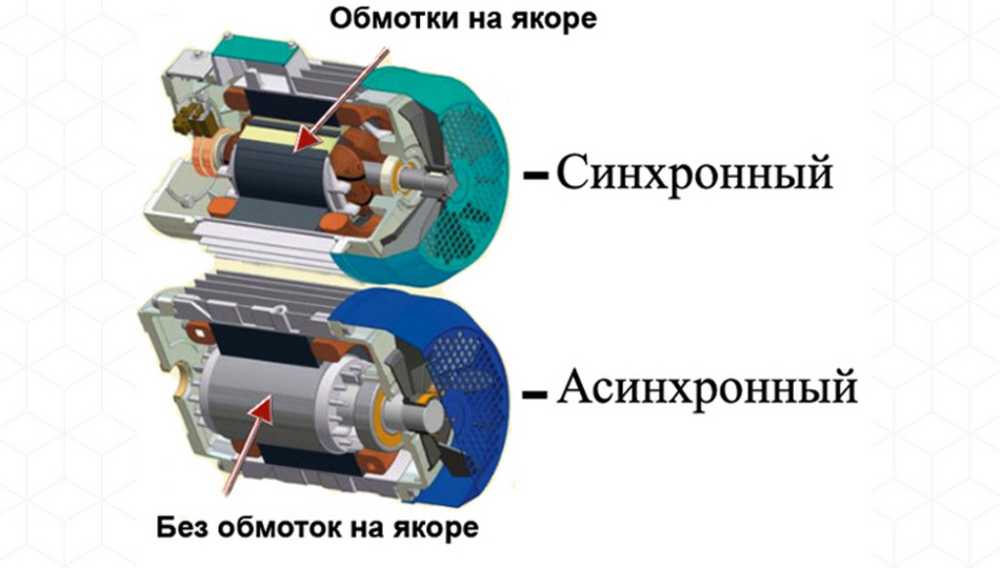
Важно! В зависимости от одновременности вращения ротора и порождающего это движение магнитного поля электрический двигатель переменного тока может быть синхронный (ротор агрегата вращается синхронно с магнитным полем статора) и асинхронный (вращение якоря не синхронизировано с движением магнитного поля статора). Первый вид отличается высокой мощностью и надежностью, в то время как второй характеризуется большим разнообразием конструкций и областей применения
Машины постоянного тока
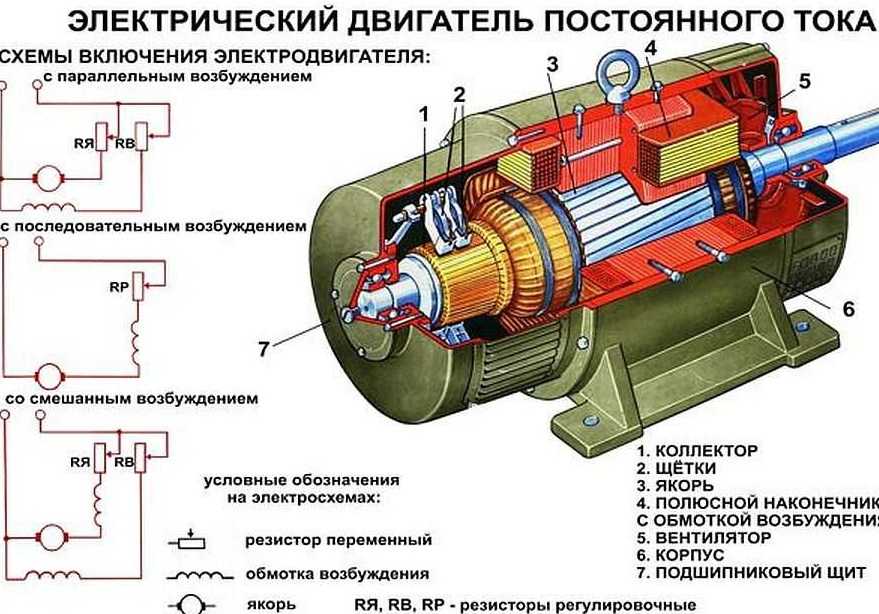
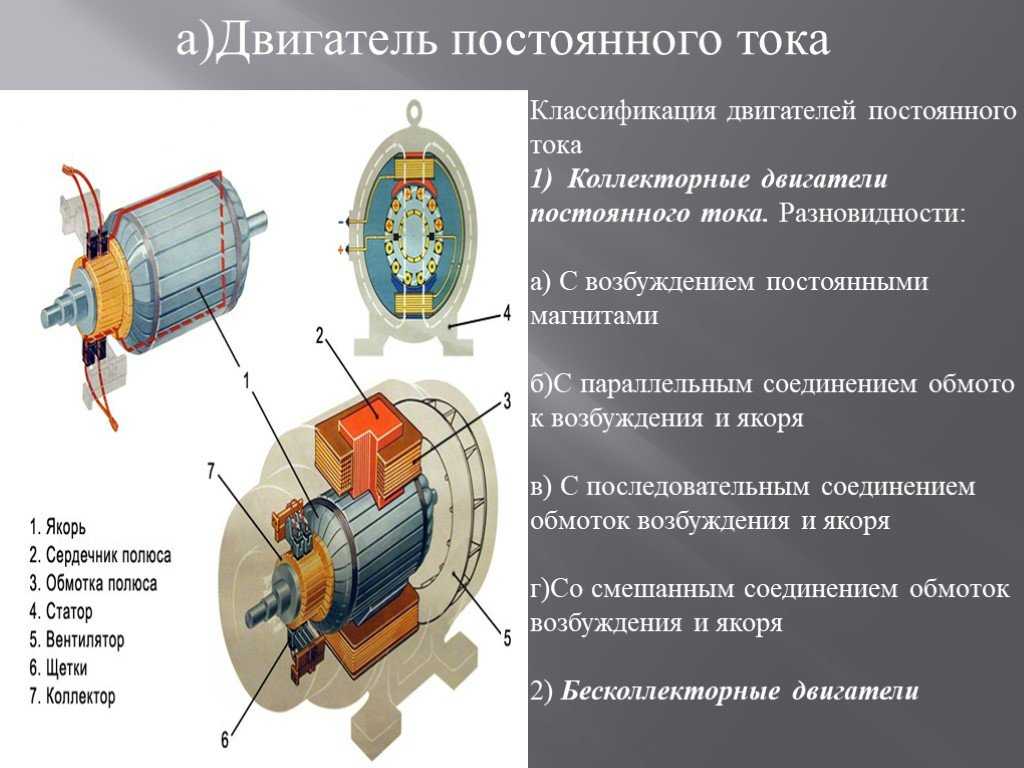
Наиболее распространенный электродвигатель постоянного тока щеточного вида представляет собой электрический агрегат, состоящий из:
- Чугунного корпуса с ребрами охлаждения и специальным монтажным коробом для подключения обмоток агрегата;
- Вала из прочной инструментальной стали с двумя подшипниками;
- Якоря, состоящего из сердечника (набора пластин из специальной электротехнической стали), якорной обмотки (размещенных в пазах сердечника катушек из медного провода);
- Индуктора, состоящего из полюсов возбуждения с намотанными на них катушками из медного провода;
- Коллектора – расположенных на валу медных пластин, к которым подключаются выводы катушек якорной обмотки;
- Подпружиненных графитовых или металлографитовых щеток (щеточной группы).
Охлаждается такой двигатель, как и аналог, работающий от переменного тока, – расположенной на валу крыльчаткой.
 Двигатель, работающий от постоянного тока
Двигатель, работающий от постоянного тока
Важно! В отличие от электродвигателя переменного тока частотой вращения ротора в таком силовом агрегате управляет специальный блок, который при помощи установленного на валу датчика Холла определяет положение ротора и его скорость. Работает подобный агрегат следующим образом:. Работает подобный агрегат следующим образом:
Работает подобный агрегат следующим образом:
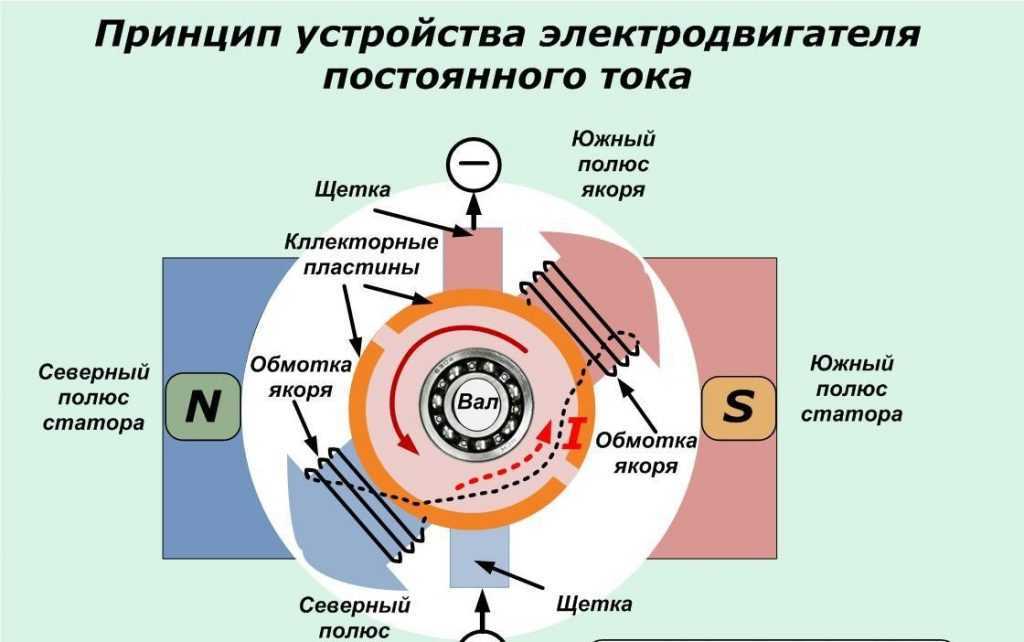
- На обмотку возбуждения подается напряжение, создавая тем самым постоянное магнитное поле;
- Через щетки и коллектор напряжение подается на катушки сердечника якоря – возникающее при этом магнитное поле отталкивается от такого же, образованного индуктором, вследствие чего двигатель начинает вращаться («запускается»);
- Впоследствии при вращении через щетки запитываются остальные катушки якорной обмотки, что приводит к равномерному вращению якоря с определённой скоростью.
Останавливают вращение такого агрегата прекращением подачи напряжения на щеточную группу.
Помимо описанных выше электромоторов, к машинам, работающим на постоянном токе, относится также роторный стартер – устройство, необходимое для запуска бензиновых и дизельных автомобильных двигателей внутреннего сгорания.
Виды двигателей постоянного тока
К концу 19 века уже началась эксплуатация электрических машин постоянного тока: генераторов и моторов. Причем оба вида не отличаются конструктивно и могли применяться как для выработки электроэнергии, так и для производства работ.







Коллекторный мотор
Принцип вращения рамки с током в поле постоянного магнита наиболее ярко реализован в коллекторных электродвигателях. Такие электродвигатели работают как от постоянного, так и от переменного тока. Впервые судно с двигателем постоянного тока запустил Б.С. Якоби по реке Неве в 1838г.
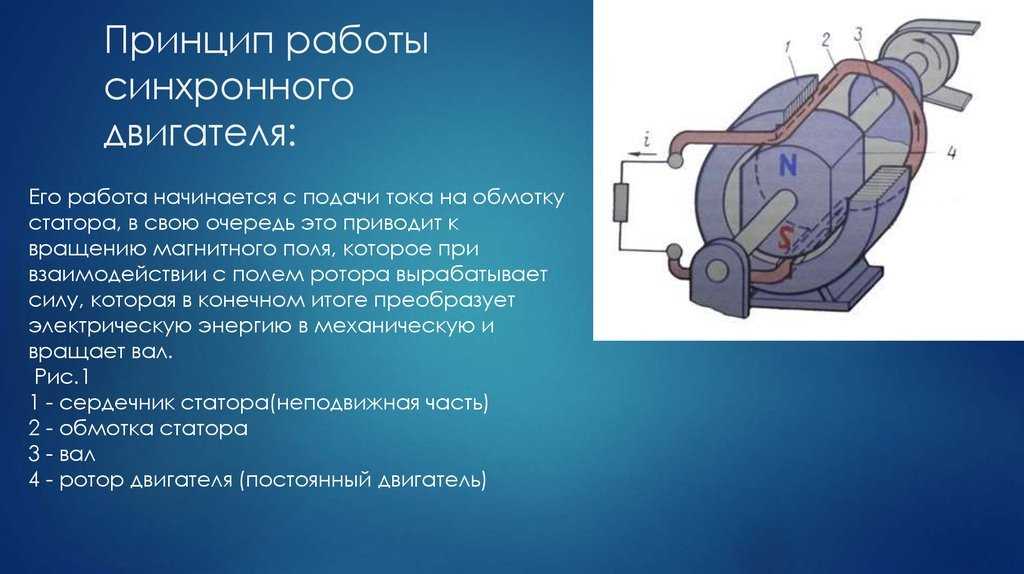
Такой двигатель состоит из неподвижной части (статор), на которой устанавливаются магниты для маломощных двигателей или катушки из ферримагнитных сталей, и обмотки с медным проводом для мощных электрических машин.
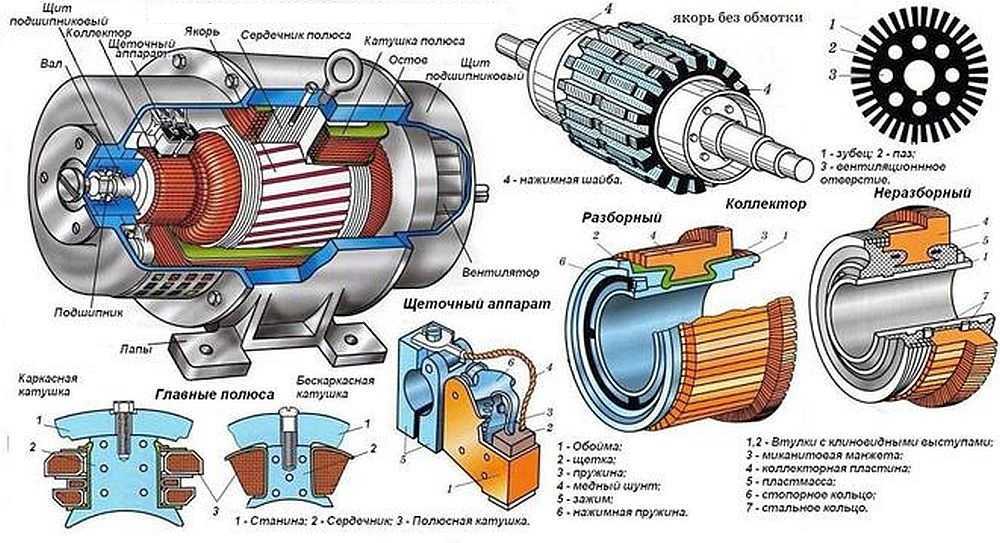
Якорь МПТ собран из пластин электротехнической стали, изолированных от вала и друг от друга для уменьшения вихревых токов. В пазы цилиндра укладывается витки провода из меди разного сечения в зависимости от токов и выбранной схемы (петлевая, волновая). Концы проводов выводятся и ввариваются (впаиваются) в ламели коллектора.
Коллектор состоит из медных изолированных пластин (ламелей) закрепленных по окружности, изолированных друг от друга и корпуса якоря. По ним перемещаются притертые подпружиненные щетки, закрепленные в щеткодержателе, для последовательной подачи тока в обмотки якоря. При подаче напряжения на щетки, якорь начинает вращаться и двигатель постоянного тока выходит в заданный режим.
Универсальный коллекторный мотор
Дальнейшее развитие коллекторных ДПТ позволило использовать их при работе от источников переменного тока. Для этого шихтуется не только якорь, но и цилиндр статора набирается из пластин электротехнической стали, а обмотки возбуждения соединяются последовательно с якорными. Одновременная смена полярности на них при прохождении переменного тока не меняет направление вращения вала двигателей.
Основное отличие — шихтованные статор и якорь делают магнитный поток стабильным и не создают вихревых токов (меньше греются). В остальном универсальный двигатель мало чем отличается от обычного коллекторного.
Вентильно-индукторные двигатели
Такие электромоторы иногда называются бесщёточными или безколлекторными. Суть такой конструкции в том, что ротор имеет зубчатое строение, собранное из постоянных магнитов, а обмотки возбуждения размещаются на зубчатых полюсах статора.
Переключением полюсов (катушек) занимается встроенный контроллер, за обратную связь, контролирующую положение якоря (ротора), отвечает датчик Холла. При включении пары катушек магнит на роторе движется к ней, затем следующая пара получает питание. Скорость вращения определяется частотой переключения катушек — чем выше частота, тем выше скорость.
Недостатком такой конструкции является пульсирующий крутящий момент. Плюсы: нет коллектора и щеток, простая конструкция, хорошее управление скоростью и малые габариты.
Безколлекторный с независимым возбуждением
Конструкция ротора этого двигателя собрана из двух зубчатых пакетов из магнитной стали на общей оси. Вершины зубцов пакета смещены друг относительно друга на 120°. Пакеты отстоят друг от друга на расстоянии, а зубцы одного совпадают с впадинами другого, таким образом, что суммарный магнитный поток ротора равен нулю.
Размещенная на статоре обмотка возбуждения тоже распределена со смещением в 120°. Собранный из электротехнической стали статор имеет размер такой, чтобы его магнитное поле перекрывало оба пакета магнитов ротора.
Поочередное включение катушек ротора создает магнитное поле в обоих магнитных блоках и ротор начинает плавно вращаться. Изменяя частоту и направление переключения секций обмотки возбуждения, а также силу тока в них, можно получить бесконтактный реверс, линейный крутящий момент и плавное изменение скорости.
Кроме этих достоинств есть еще отсутствие магнитов и графитовых щеток с коллектором. К недостаткам можно отнести сложность конструкции двигателей и питание обмоток от электронного преобразователя.
Несомненными достоинствами двигателей постоянного тока можно отнести:
- уровень плавного регулирования скорости достигает 10000 об/мин;
- легкость управления скоростью за счет напряжения, а крутящего момента — током якоря;
- за счет обратной связи можно поддерживать хороший момент на малых оборотах.
Их недостатков можно отметить обязательное наличие преобразователя переменного тока в постоянный и сложность конструкции некоторых видов двигателей (коллектор со щетками, сложный якорь).